Recommendation
I recommend this technical report by Park and Boisgontier. The authors present an innovative adaptation of the approach-avoidance task using the Kinarm robotic platform. Their Kinarm Approach-Avoidance Task (KAAT) enables precise measurement of multiple kinematic variables across multiple reach directions, providing richer behavioral data than traditional keyboard or joystick-based approaches. The robust technical documentation, including detailed task specifications and pilot data, demonstrates Kinarm’s capability to capture nuanced aspects of motor behavior like reaction times, movement speeds, and acceleration patterns. Particularly noteworthy are the potential applications across various clinical domains. This work also complements previous work done by Perry and colleagues, where they used an object hit and avoid task to create a comprehensive statistical model of motor learning. The authors have also thoughtfully included the capability to apply resistive loads during reaching movements. The transparent sharing of materials and code through their GitHub repository also reflects commendable research practices. While the pilot sample is small, the thorough technical foundation laid by this work opens valuable new avenues for investigating approach-avoidance tendencies with a lot of kinematic detail.
DOI or URL of the preprint: https://doi.org/10.51224/SRXIV.446
Version of the preprint: 1
Dear Recommender,
We would like to thank the reviewers for the provision of constructive comments that contributed to improve the quality of our manuscript titled “A novel robotic reaching task to advance the assessment of approach-avoidance tendencies through kinematic analysis”.
Please find below our point-by-point responses to their comments. The reviewers’ comments are in bold, our responses are in regular font, and quotes from the manuscript are in italics.
Best regards,
Kayne Park and Matthieu Boisgontier
---
RECOMMENDER:
Thank you for submitting this preprint to PCI Health and Mov Sci. Three reviewers have evaluated your preprint. Overall, the reviewers are enthusiastic about this preprint. Based on their suggestions, my recommendation is to that you address some of the issues raised by the Reviewers, such as adding conclusion/summary to the preprint and adding a section on implications for clinical disorders. I think the Reviewers have made some good points. Addressing those concerns will certainly improve the quality of the preprint.
Authors: Thank you for your feedback. We have done our best to address all the comments provided by the three reviewers.
---
REVIEWER 1:
Park and Boisgontier described a version of the Approach-Avoidance task that has been created to run on the Kinarm robotic labs. A key feature of this task is that is has been developed to provide a wealth of kinematic data that will allow researchers to better characterize an individual's approach-avoid tendencies. Overall, the manuscript is well-written and the description of the task and the walkthrough for administering the KAAT is straightforward. I do believe a researcher would be able to administer the KAAT after reading this manuscript. Given the nature of the paper, I only have a few of comments/suggestion for the authors.
Authors: We thank the reviewer for their positive feedback on our work.
1. A key argument raised for developing this version of the task is the benefit of kinematic measures such as hand speed for understanding approach-avoidance tendencies. However, no kinematic data related to performing the task is presented in the manuscript. I do think there is value in at least showing some plots of this for the reader so they can get an idea of how these kinematic measures might lead to a better understanding of approach-avoidance tendencies beyond just relying on measures like reaction time and error rate.
Authors: We agree, thank you for this comment. As suggested, we have tested a sample of five people to obtain kinematic data and have provided plots to illustrate this data.
Pages 12-15, lines 281-321:
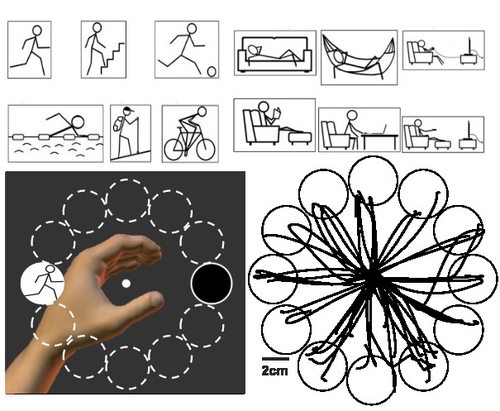
A new figure has been added: Figure 8. Hand paths and hand speeds of an exemplar performing the KAAT. The two columns on the left display KAAT performance for Approach trials and the two columns on the right display Avoid trials. The central column illustrates the stimuli the participants were instructed to approach or avoid. Hand paths for each direction of reach are shown in the 2nd and 4th columns of the figure. Hand speed is displayed in columns 1 and 5. Data is displayed from the time period that the Approach and Avoid targets appeared (0 ms) until the end of the trial (correct target reached). Each plot presents data of the left and right arms grouped together.
A new table has been added: Table 1. Sample parameters of kinematic data (n = 5).
2. As the Kinarm allows videos of trials to be recorded, perhaps it would be beneficial to include in the GitHub repository a video of some of the different trial types and reaches.
Authors: We thank the reviewer for this suggestion. Videos of our sample performing the KAAT have been uploaded to the GitHub repository.
3. The manuscript ends rather abruptly from describing the Block table to Declarations. While I recognize the unique nature of this type of paper, I do think it would still benefit from some kind of conclusion or summary at the end. If some plots related to the collected data are included, this summary could really highlight the advantage of using this task for researchers in this area with a Kinarm.
Authors: As suggested, we have included a Discussion section elaborating on the value of assessing kinematic variables for psychological tests.
Pages 14,15, lines 323-354:
“7. Discussion
The KAAT is a bimanual multidirectional reaching task developed on the Kinarm Endpoint robot to quantify approach-avoidance tendencies towards visual stimuli. This technical report describes an overview on the images displayed in this variant of the KAAT, details of the operation to guide new users, and specifications on the backend details for users to modify the task. Pilot data and preliminary analysis of the KAAT highlight kinematic parameters that can be used to characterize approach-avoidance tendencies.
Most approach-avoidance tasks have used either a keyboard, joystick, computer mouse, or touch screen, to assess automatic attitudes towards 2 directions of movement. The KAAT quantifies approach-avoidance tendencies using 24 reach directions, increasing difficultly due to greater uncertainty in stimulus location and the motor command to be implemented, which results in longer reaction times (Burke et al., 2017; Kaufman et al., 1970; Xu et al., 2012). Further, our design included neutral stimuli, which allowed for the control of a potential generic approach or avoidance bias (Farajzadeh et al., 2023a). Future validation work is therefore needed to examine how results in the KAAT compare with other versions of the approach-avoidance task.
Here, the KAAT was used to assess approach-avoidance tendencies towards physical activity and sedentary behaviours. However, the KAAT could be easily adapted for different goals since any image can be displayed to participants simply by changing the image files. Therefore, the KAAT can contribute to characterize health conditions such as social anxiety, depression, alcoholism, and eating disorders which has typically focused on reaction time (Heuer et al., 2007; Lender et al., 2018; Spruyt et al., 2013; Struijs et al., 2017). Further, the KAAT can refine this characterisation of human behaviour through the high sampling rate of upper limb motion - beyond what can be achieved with key presses or joystick manipulations commonly used in previous versions of the approach-avoidance task. This refined characterisation is important as some of these health conditions have been associated with sensorimotor impairments (Ben-Pazi et al., 2011; Emck et al., 2011; Northoff, 2024; Van Damme, Fransen, et al., 2015; Van Damme, Simons, et al., 2015). Our pilot data highlights approach-avoidance tendencies for reaction time and movement speed. In addition, parameters such as speed peaks, which represent a change in movement direction, and acceleration, which represents movement vigor, may provide useful measures to further investigate the links between approach-avoidance tendencies, sensorimotor impairments, and health behaviours (Djamshidian et al., 2012; Kucinski et al., 2018; Mestre et al., 2013).”
---
REVIEWER 2:
SUMMARY
This manuscript presents a novel adaptation of the Approach-Avoidance Task (AAT) using the Kinarm Endpoint Laboratory. The Kinarm Approach Avoidance Task (KAAT) offers a unique and quantitative way to study automatic approach-avoidance tendencies through upper limb movements. The manuscript describes the development of the task, its potential for providing richer kinematic data compared to traditional interfaces, and its applications in cognitive and motor research.
Authors: We thank the reviewer for highlighting the uniqueness and potential of our work.
STRENGTHS
1. Innovative Use of Robotics: The integration of the Kinarm system with the AAT provides a significant advancement in assessing approach-avoidance tendencies. The ability to capture kinematic variables such as hand speed and movement direction adds a valuable dimension to the study of human behavior. 2. Task Customizability: The KAAT’s flexibility in presenting various stimuli and applying resistive loads demonstrates its potential for broad applications in research, including rehabilitation. 3. Clear Task Description: The manuscript provides detailed explanations of task parameters, operations, and conditions, making the study replicable for other researchers. 4. Interdisciplinary Relevance: By linking cognitive functions to motor responses, the study bridges psychology, neuroscience, and rehabilitation science, expanding its impact across disciplines. 5. Supporting Literature: The authors thoroughly reference previous work, contextualizing the KAAT within the broader research landscape.
Authors: We thank the reviewer for raising the strengths of our work.
WEAKNESSSES
1. Include Pilot Data: Adding preliminary data with a brief analysis would provide concrete evidence of the task’s effectiveness and reliability.
Authors: As suggested, we have tested a sample of five people to obtain kinematic data and have provided descriptive results and plots to illustrate this data.
Pages 12-15, lines 281-321:
A new figure has been added: Figure 8. Hand paths and hand speeds of an exemplar performing the KAAT. The two columns on the left display KAAT performance for Approach trials and the two columns on the right display Avoid trials. The central column illustrates the stimuli the participants were instructed to approach or avoid. Hand paths for each direction of reach are shown in the 2nd and 4th columns of the figure. Hand speed is displayed in columns 1 and 5. Data is displayed from the time period that the Approach and Avoid targets appeared (0 ms) until the end of the trial (correct target reached). Each plot presents data of the left and right arms grouped together.
A new table has been added: Table 1. Sample parameters of kinematic data (n = 5).
2. Expand Discussion on Rehabilitation Applications: Provide more examples of how the KAAT could be tailored for different clinical populations and specific rehabilitation goals.
Authors: As suggested, we now discuss the ability of the KAAT to quantify kinematic performance for automatic attitudes to visual stimulus. However, how the KAAT could be tailored for different clinical populations and specific rehabilitation goals is a question that goes beyond the scope of this technical report.
Pages 14,15, lines 323-354:
“7. Discussion
The KAAT is a bimanual multidirectional reaching task developed on the Kinarm Endpoint robot to quantify approach-avoidance tendencies towards visual stimuli. This technical report describes an overview on the images displayed in this variant of the KAAT, details of the operation to guide new users, and specifications on the backend details for users to modify the task. Pilot data and preliminary analysis of the KAAT highlight kinematic parameters that can be used to characterize approach-avoidance tendencies.
Most approach-avoidance tasks have used either a keyboard, joystick, computer mouse, or touch screen, to assess automatic attitudes towards 2 directions of movement. The KAAT quantifies approach-avoidance tendencies using 24 reach directions, increasing difficultly due to greater uncertainty in stimulus location and the motor command to be implemented, which results in longer reaction times (Burke et al., 2017; Kaufman et al., 1970; Xu et al., 2012). Further, our design included neutral stimuli, which allowed for the control of a potential generic approach or avoidance bias (Farajzadeh et al., 2023a). Future validation work is therefore needed to examine how results in the KAAT compare with other versions of the approach-avoidance task.
Here, the KAAT was used to assess approach-avoidance tendencies towards physical activity and sedentary behaviours. However, the KAAT could be easily adapted for different goals since any image can be displayed to participants simply by changing the image files. Therefore, the KAAT can contribute to characterize health conditions such as social anxiety, depression, alcoholism, and eating disorders which has typically focused on reaction time (Heuer et al., 2007; Lender et al., 2018; Spruyt et al., 2013; Struijs et al., 2017). Further, the KAAT can refine this characterisation of human behaviour through the high sampling rate of upper limb motion - beyond what can be achieved with key presses or joystick manipulations commonly used in previous versions of the approach-avoidance task. This refined characterisation is important as some of these health conditions have been associated with sensorimotor impairments (Ben-Pazi et al., 2011; Emck et al., 2011; Northoff, 2024; Van Damme, Fransen, et al., 2015; Van Damme, Simons, et al., 2015). Our pilot data highlights approach-avoidance tendencies for reaction time and movement speed. In addition, parameters such as speed peaks, which represent a change in movement direction, and acceleration, which represents movement vigor, may provide useful measures to further investigate the links between approach-avoidance tendencies, sensorimotor impairments, and health behaviours (Djamshidian et al., 2012; Kucinski et al., 2018; Mestre et al., 2013).”
3. Simplify Task Details: Use visuals, such as flowcharts or schematic diagrams, to clarify task operations and conditions for readers unfamiliar with the Kinarm system.
Authors: We thank the reviewer for this suggestion. A flowchart and a description of the task flow have been added.
Page 3, a new figure has been added: Figure 1
Figure 1. (A) Kinarm Endpoint laboratory. (B) Trial in the Neutral Stimulus condition with a Circle Stimulus appearing in the west direction and the open circle appearing in the opposite direction (east). The dashed circles are didactic to indicate possible target locations and are not visible to the participant. The hand is not visible to the participant during the task as it is masked by the opaque screen.
Page 6, a new figure has been added: Figure 4.
Figure 4. Flowchart depicting the operation flow of the KAAT. Arrow direction indicates the next step in the task. Dashed arrows represent alternative outcomes.
4. Address Validity and Reliability: Discuss plans for validating the KAAT, including test-retest reliability, sensitivity to behavioral changes, and comparability with traditional AAT measures.
Authors: We now mention that future research assessing validity and reliability is required.
Pages 14,15, lines 330-354:
“Most approach-avoidance tasks have used either a keyboard, joystick, computer mouse, or touch screen, to assess automatic attitudes towards 2 directions of movement. The KAAT quantifies approach-avoidance tendencies using 24 reach directions, increasing difficultly due to greater uncertainty in stimulus location and the motor command to be implemented, which results in longer reaction times (Burke et al., 2017; Kaufman et al., 1970; Xu et al., 2012). Further, our design included neutral stimuli, which allowed for the control of a potential generic approach or avoidance bias (Farajzadeh et al., 2023a). Future validation work is therefore needed to examine how results in the KAAT compare with other versions of the approach-avoidance task.
Here, the KAAT was used to assess approach-avoidance tendencies towards physical activity and sedentary behaviours. However, the KAAT could be easily adapted for different goals since any image can be displayed to participants simply by changing the image files. Therefore, the KAAT can contribute to characterize health conditions such as social anxiety, depression, alcoholism, and eating disorders which has typically focused on reaction time (Heuer et al., 2007; Lender et al., 2018; Spruyt et al., 2013; Struijs et al., 2017). Further, the KAAT can refine this characterisation of human behaviour through the high sampling rate of upper limb motion - beyond what can be achieved with key presses or joystick manipulations commonly used in previous versions of the approach-avoidance task. This refined characterisation is important as some of these health conditions have been associated with sensorimotor impairments (Ben-Pazi et al., 2011; Emck et al., 2011; Northoff, 2024; Van Damme, Fransen, et al., 2015; Van Damme, Simons, et al., 2015). Our pilot data highlights approach-avoidance tendencies for reaction time and movement speed. In addition, parameters such as speed peaks, which represent a change in movement direction, and acceleration, which represents movement vigor, may provide useful measures to further investigate the links between approach-avoidance tendencies, sensorimotor impairments, and health behaviours (Djamshidian et al., 2012; Kucinski et al., 2018; Mestre et al., 2013).”
5. Stimuli Selection: Include a discussion on how potential biases in visual stimuli will be managed and whether diverse stimuli could broaden the KAAT’s applicability.
Authors: We are not certain we fully understand this comment. The objective is specifically to assess and compare the biases induced by experimental stimuli (e.g., images depicting physical activity vs. images depicting sedentary stimuli) while controlling for potential generic approach or avoidance bias using neutral stimuli. To address this point, we have explicitly labeled each type of stimulus (‘Experimental Stimulus’; ‘Neutral Stimulus’). If this does not fully address the reviewer’s concern, we kindly request further clarification.
6. Figures and figure competition: The figures could benefit from better-explained captions and some flow charts or tables. The specific comments about the figures are mentioned at the end of the document.
Authors: We have improved the captions and have included a flowchart explaining the flow of the KAAT.
We have added new figures: Page 6, Figure 4 (see above).
OVERALL ASSESSMENT
The manuscript introduces an innovative tool with significant potential for advancing research on approach-avoidance tendencies. While the design and application are well-detailed, the manuscript would benefit from empirical validation, expanded discussion on clinical applications, and simplification of technical descriptions. Addressing these aspects will enhance its impact and appeal to a broader audience.
Authors: We thank the reviewer for the positive assessment of our work. As described in our responses below, data and analyses have been added, the discussion has been expanded, and technical descriptions have been simplified.
Comments on Title:
The title, “Kinarm Approach Avoidance Task: A robot-based reaching task to assess automatic attitudes towards visual stimuli,” emphasizes the use of the Kinarm system and its relevance to assessing approach-avoidance tendencies. However, it does not convey the unique features or advantages of the KAAT compared to traditional AATs, such as the ability to capture detailed kinematic data or its potential applications in rehabilitation and cognitive research. A more descriptive title could highlight these aspects, for example: “Kinarm Approach Avoidance Task: Advancing the Assessment of Automatic Attitudes through Robotic Reaching and Kinematic Analysis.”
Authors: As recommended, the title has been modified to: “A novel robotic reaching task to advance the assessment of approach-avoidance tendencies via kinematic analysis”.
Comments on Abstract:
The abstract effectively outlines the key aspects of the study, including the limitations of traditional AATs, the unique features of the KAAT, and its potential for studying approach- avoidance tendencies. However, it does not include any empirical findings or pilot data. While this is understandable for a methodological paper, mentioning hypothetical applications or expected outcomes could strengthen its appeal.
Authors: As recommended, pilot data is now mentioned in the Abstract:
Page 1, lines 23-24:
“The investigation of automatic approach-avoidance tendencies has traditionally relied on computer-based technologies that primarily characterise human behaviour through reaction times. However, these technologies are unable to accurately quantify other parameters such as hand speed, movement direction, and applied forces. To address these limitations, novel robotic devices have been developed, providing more diverse and accurate quantitative assessment of human behaviour. This technical report presents an adaptation of the approach-avoidance task on the Kinarm, a robotic platform designed to track upper limb movements as participants interact with a virtual environment. This variant of the approach-avoidance task assesses the movement kinematics of both arms in twelve directions of reach. In addition, resistive loads can be applied to investigate the role of physical effort in approach-avoidance tendencies or to support rehabilitation protocols. Data and analyses from a pilot sample (n = 5) highlights the capabilities of the Kinarm Approach-Avoidance Task (KAAT).”
Comments on Introduction:
While the introduction provides a thorough overview of the context and importance of approach- avoidance tendencies, it does not explicitly outline specific research questions, hypotheses, or predictions. A clear statement of the study’s objectives and expected outcomes (e.g., how the KAAT improves upon traditional AATs or its anticipated findings in movement analysis) would strengthen the introduction.
Authors: This technical report is focused on describing a variant of the approach-avoidance task for use on the Kinarm highlighting the potential for robotic technologies to accurately quantify kinematic data that is not commonly assessed for approach-avoidance tendencies. Therefore, we are unable to specify research questions, hypotheses, or predictions.
We have previously clarified our intentions with this paper by focusing the last paragraph of the Introduction to highlight the use cases of the KAAT and the features that researchers or clinicians can utilize for there own research studies.
Pages 2-3, lines 64-79:
“In this technical report, we describe the Kinarm Approach-Avoidance Task (KAAT), a variant of the approach-avoidance task that leverages the capabilities of robotics. The KAAT has been developed for the Kinarm Endpoint system to provide a wealth of kinematic data to characterize approach-avoidance tendencies. The stimuli can be chosen according to the objectives of study (e.g., smoking-related images, alcohol-related images, high vs. low-calorie food images, gambling-related images). Here, for the sake of illustration, we used stimuli depicting physical activities (e.g., running, swimming) and sedentary activities (e.g., lounging in a hammock, watching TV). Participants are given instructions to either quickly reach towards the stimulus location (‘Approach’) or to reach in the opposite direction (‘Avoid’). The KAAT assesses both arms and quantifies centre-out reaching in 12 different directions to dissociate approach-avoidance tendencies from the bias towards specific actions, such as flexion versus extension (Cacioppo et al., 1993) or pushing versus pulling (Chen & Bargh, 1999; Wittekind et al., 2021). Resistive loads can be applied during reaches toward certain visual stimuli for the experimental manipulation of physical effort during reaching towards specific visual stimuli and for rehabilitation protocols aimed at strengthening or weakening specific approach-avoidance tendencies (Farajzadeh et al., 2023b; Marteau et al., 2012)."
The introduction references a wide range of relevant literature, including studies on approach- avoidance tendencies, traditional AAT methods, and the application of robotic systems like the Kinarm in cognitive and motor research. This contextualizes the work effectively and highlights the novelty of the KAAT. However, more explicit connections between prior studies and the specific goals of the KAAT could enhance the narrative.
Authors: The connection between previous methods assessing approach-avoidance tendencies and the KAAT is explicated as follows:
Page 2, lines 53-63:
“In approach-avoidance tasks, interfaces such as joysticks, mice, and keyboards are commonly used to characterise behavioural performance based on reaction times (Krieglmeyer & Deutsch, 2010; Phaf et al., 2014; Wittekind et al., 2021). However, other measures, such as hand speed (kinematics) may contribute to a better understanding of approach-avoidance tendencies. A good example is the study by Barton and colleagues, who used the approach-avoidance task to examine a potential bias towards self-owned objects (Barton et al., 2021). They found a significant bias in reaction time for both congruent (approaching self-owned or avoiding experimenter-owned objects) and incongruent (approaching experimenter-owned or avoiding self-owned objects) mappings. However, this bias in movement duration (i.e., speed) was only significant for the congruent mapping. Therefore, examining different measures of movement can provide a more complete characterisation of the influence that biases can have on behaviour.”
Authors: How the KAAT could enhance approach-avoidance assessment is described as follows:
Pages 3,4, lines 89-102:
“Since the 2000s, robotic technologies have been developed to improve the quantification of human behaviour in research and clinical settings (e.g., Howard et al., 2009; Reichenbach et al., 2013; Shirota et al., 2017; Zbytniewska et al., 2019). One such technology, the Kinarm Endpoint Laboratory, is specifically designed to measure upper limb movements. This platform uses two haptic robots with handles that participants can grasp and move along the horizontal plane in an augmented reality environment (Scott, 1999) (Figure 1A). A screen is positioned above the handles and provides participants with information on their hand position along the same horizontal plane. Participants’ movements and forces are tracked by motors providing kinematic data. This robotic interface provides greater degrees of freedom for participants than joysticks, mice, or keyboards. Custom tasks have been developed to assess behaviour in healthy participants and to identify impairments across various conditions, such as stroke, Parkinson’s disease, kidney disease, and epilepsy (Bourke et al., 2016; Gaprielian et al., 2022; Lowrey et al., 2022; Simmatis et al., 2020; Vanderlinden et al., 2022). Thus, this robotic device has proven to be an effective tool for quantifying behaviour and cognitive function.”
Comments on Materials and Methods:
The manuscript provides detailed descriptions of the task layout, operational procedures, and specifications for the Kinarm system. Key aspects, such as the stimulus conditions, trial protocols, and block structure, are explained thoroughly. However, while the technical details are comprehensive, some sections (e.g., the task parameters and force application) could benefit from additional clarification or visual aids (e.g., a summary table or flowchart) to make replication easier for researchers unfamiliar with the Kinarm system.
Authors: As recommended, a flow chart has been added.
The methods for task implementation are well described, but there is no mention of statistical analyses or how the data will be validated or interpreted. While this may be acceptable for a methodological paper, a brief section on planned statistical approaches (e.g., how kinematic data will be analyzed or compared across conditions) would enhance the rigor and completeness of the methods. Including a discussion of how reliability and validity will be assessed would also strengthen this section.
Authors: As recommended, pilot data and descriptive analyses have been added (please see above).
Comments on Results:
The manuscript does not include a section presenting statistical power analysis, Bayesian analysis, or equivalence testing for any negative results.
Authors: The manuscript is a Technical Report. As such, these analyses were not required.
While the task’s operational results are described, there is no clear presentation or interpretation of empirical data, as the manuscript focuses primarily on task development. Without actual results or data interpretation, it is challenging to determine whether the KAAT’s performance aligns with the stated objectives. If this is a methodological manuscript, it would benefit from including pilot data or example analyses to validate the task’s utility and interpretation framework.
Authors: As recommended, kinematic data are now illustrated (please see above).
Comments on Discussion:
The discussion highlights the innovative aspects of the Kinarm Approach Avoidance Task (KAAT), such as its ability to capture detailed kinematic data and its potential applications in rehabilitation. However, it does not sufficiently address the limitations of the study, including the lack of empirical validation, potential challenges in adapting the KAAT for diverse populations, or possible biases introduced by the visual stimuli. Explicitly discussing these limitations would provide a more balanced perspective and enhance the manuscript’s credibility.
Authors: As recommended, study limitations have been added to the Discussion section.
Page 14, lines 330-337:
“8. Limitations
As the aim of this technical report is to describe a novel method for assessing approach-avoidance tendencies using robotics, we did not conduct hypothesis testing on our small sample size. Thus, our interpretation of the results is strictly descriptive and future work with larger samples are required to have adequate power for statistical testing.
The KAAT has been designed and tested using images of physical activity and sedentary behaviour that have been previously validated in Europe and used for an approach-avoidance task conducted on a computer-based system (Cheval et al., 2018; Farajzadeh et al., 2023a; Farajzadeh et al., 2024). Whether these images effectively represent physical activity and sedentary behaviour across cultural, societal, economic, and environmental contexts remains to be examined. This potential bias of the stimuli used here to illustrate the KAAT could be mitigated by selecting other images that more accurately represent physical activity in the specific context under investigation.”
The conclusions are based on the theoretical advantages of the KAAT but lack empirical data to support the claims. While the task’s design is promising, the absence of results means the conclusions rely heavily on the potential of the method rather than demonstrated outcomes. Including pilot data or a clear validation framework would ensure the conclusions are adequately supported and prevent overstating the implications of the findings.
Authors: As recommended, pilot data have been added (please see above) and kinematic outcomes have been illustrated (please see above).
Comments on Figures:
The figures are well-structured and appropriately illustrate the task layout, stimulus conditions, and operation details. However:
1. Some figures, particularly those showing trial operations (e.g., Figures 1, 6, and 13), could benefit from clearer annotations or labels to enhance understanding for readers unfamiliar with the Kinarm system. This includes mentioning the x and y axis of the kinarm instead of direction as (east and or west).
Authors: Due to the presence of 12 different reach directions, we believe the cardinal descriptions such as east and west convey direction more accurately than mentioning the data using an x and y coordinate axis.
2. The figures showing stimuli (Figures 2-5) are visually clear but could include captions that explicitly explain how these stimuli contribute to assessing approach-avoidance tendencies.
Authors: These figures have been merged in a single figure with 4 panels. Kinematic data collected when participants reach these stimuli such as faster reaction time, higher maximum speed, changes in speed can be used to determine tendencies to approach or avoid these stimuli.
Page 3, Added Figure 1 (see above)
Page 5, Added Figures 2 and 3
Figure 2. (A) Images depicting physical activities used as ’Active Stimulus’. (B) Images depicting sedentary activities used as ’Sedentary Stimulus’. (C) Images used as ’Circle Stimulus’. (D) Images used as ’Square’ Stimulus’. Each image label corresponds to the filename and each image number corresponds to the Trial Protocol used in Dexterit-E.
Figure 3. Instruction images shown to participants before an Approach Active Stimulus block (A), an Approach Sedentary Stimulus block(B), an Approach Circle Stimulus block (C), and an Approach Square Stimulus block (D).
Page 7, Figure 5
Figure 5. (A) Image taken at the start of a block. This block displays the Approach-Circle (Avoid-Square) instruction with a green circle available for participants to move the cursor of either hand in to begin. (B) Start of a trial. This trial displays the blue Start target in the left side of the workspace for the participant to place their left arm into to begin the trial.
Page 8, Figure 6
Figure 6. Illustration of trials of an Approach Circle block. (A) Left hand correctly approaching the Circle Stimulus (white arrow not shown to participants). (B) Left hand correctly avoiding the Square Stimulus by reaching towards the open circle (white arrow not shown to participants). (C) Incorrect reach to the open circle resulting in an ‘Incorrect!’ text. (D) No reach towards any target resulting in a ‘Too slow!’ text.
3. It would be helpful to include a figure summarizing the overall workflow of the KAAT (e.g., a flowchart or schematic of task progression) to complement the detailed textual description.
Authors: As recommended, a flow chart has been added (please see above).
---
REVIEWER 3:
The preprint submitted is not an experimental study, so most of the typical components are not included. The preprint presents the adaptation of an existing task using a novel equipment. The application of this task will provide the researcher with additional information that could help better characterize participants’ responses. In the preprint the authors provide a detailed explanation of the task as well as task specifications as a user guide. I find the introduction well written, as to justify the use of the Kinarm with an already existing task, as well as the task itself. The task information is very detailed, useful for a naïve researcher trying to decide if the task and equipment would be suitable for their research, as well as a researcher looking to implement the task with all the information on how to set it up exactly. All the included figures are understandable and useful for the development of the preprint. This preprint would work as a good reference in order to not have to explain such complex methodology in a future manuscript.
Authors: We thank the reviewer for their positive assessment of our work.
 , posted 25 Nov 2024, validated 25 Nov 2024
, posted 25 Nov 2024, validated 25 Nov 2024Dear Dr. Park and Dr. Boisgontier:
Thank you for submitting this preprint to PCI Health and Mov Sci. Three reviewers have evaluated your preprint. Overall, the reviewers are enthusiastic about this preprint. Based on their suggestions, my recommendation is to that you address some of the issues raised by the Reviewers, such as adding conclusion/summary to the preprint and adding a section on implications for clinical disorders.
I think the Reviewers have made some good points. Addressing those concerns will certainly improve the quality of the preprint.
Tarkeshwar Singh
Review of "Kinarm Approach Avoidance Task: A robot-based reaching task to assess automatic attitudes towards visual stimuli"
Park and Boisgontier described a verison of the Approach-Avoidance task that has been created to run on the Kinarm robotic labs. A key feature of this task is that is has been developed to provide a wealth of kinematic data that will allow researchers to better characterize an individual's approach-avoid tendencies. Overall, the manuscript is well-written and the description of the task and the walkthrough for administering the KAAT is straightforward. I do believe a researcher would be able to administer the KAAT after reading this manuscript. Given the nature of the paper, I only have a few of comments/suggestion for the authors.
1. A key argument raised for developing this version of the task is the benefit of kinematic measures such as hand speed for understanding approach-avoidance tendencies. However, no kinematic data related to performing the task is presented in the manuscript. I do think there is value in at least showing some plots of this for the reader so they can get an idea of how these kinematic measures might lead to a better understanding of approach-avoidance tendencies beyond just relying on measures like reaction time and error rate.
2. As the Kinarm allows videos of trials to be recorded, perhaps it would be beneficial to include in the GitHub repository a video of some of the different trial types and reaches.
3. The manuscript ends rather abruptly from describing the Block table to Declarations. While I recognize the unique nature of this type of paper, I do think it would still benefit from some kind of conclusion or summary at the end. If some plots related to the collected data are included, this summary could really highlight the advantage of using this task for researchers in this area with a Kinarm.
PCI Standard Questions:
For all responses of "No (please explain)" to the requested questions below, this is because the paper describes a newly created Kinarm task so it is more of a methods paper than a traditional experimental paper so many of the questions do not necesarily apply to this type of paper. However, as mentioned in my comments I do think there is a need to include some of the kinematic data from this task in the paper to better highlight how this version of the task improves on others that solely rely on reaction time and error rate data.
Title and abstract
- Does the title clearly reflect the content of the article? [X] Yes, [ ] No (please explain), [ ] I don't know
- Does the abstract present the main findings of the study? [ ] Yes, [X] No (please explain), [ ] I don’t know
Introduction
- Are the research questions/hypotheses/predictions clearly presented? [ ] Yes, [X] No (please explain), [ ] I don’t know
- Does the introduction build on relevant research in the field? [X] Yes, [ ] No (please explain), [ ] I don’t know
Materials and methods
- Are the methods and analyses sufficiently detailed to allow replication by other researchers? [X] Yes, [ ] No (please explain), [ ] I don’t know
- Are the methods and statistical analyses appropriate and well described? [ ] Yes, [X] No (please explain), [ ] I don’t know
Results
- In the case of negative results, is there a statistical power analysis (or an adequate Bayesian analysis or equivalence testing)? [ ] Yes, [X] No (please explain), [ ] I don’t know
- Are the results described and interpreted correctly? [ ] Yes, [X] No (please explain), [ ] I don’t know
Discussion
- Have the authors appropriately emphasized the strengths and limitations of their study/theory/methods/argument? [ ] Yes, [X] No (please explain), [ ] I don’t know
- Are the conclusions adequately supported by the results (without overstating the implications of the findings)? [ ] Yes, [X] No (please explain), [ ] I don’t know
