
DURANDEAU Guillaume
Recommendations: 0
Review: 1
Review: 1
09 Jan 2025
Improved accuracy of the whole body Center of Mass position through Kalman filtering
Improved estimation of the whole-body center of mass, a step ahead in biomechanical analyses of balance control.
Recommended by Jaap van Dieen based on reviews by Maarten Afschrift, Guillaume Durandeau and 1 anonymous reviewerEstimation of the whole-body center of mass (CoM) is crucial in many biomechanical studies of human and animal movement. It is especially important in studies on the control of balance. For example, it has been assumed that sensory information is used to correct the horizontal position and velocity of the CoM (van Dieën et al., 2024; Wang and Srinivasan, 2014; Welch and Ting, 2008), to stabilize standing and walking against gravity. The studies cited have used more-or-less sophisticated estimates of the CoM, derived from kinematic, in some cases combined with anthropometric data, to predict motor outputs. These studies have provided support for the notion that the position and velocity of the CoM are controlled. This holds promise for the diagnosis of the quality of such feedback control as a cause of balance impairments and fall risk. However, such applications will suffer from errors in outcomes at the individual level, for example due to a poor fit of the anthropometrical model to a certain individual.
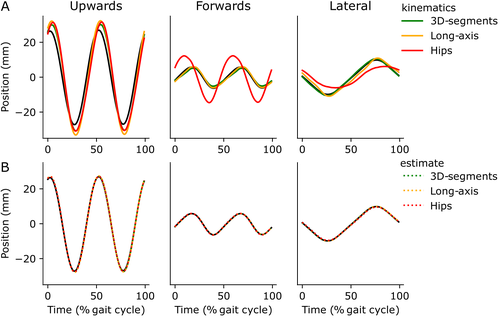
Le Mouel (Le Mouel, 2025) presents a novel approach to estimate the position of the CoM. The author proposes that CoM estimation can be improved by optimally combining kinematic and kinetic data through a Kalman filter. The Kalman-filter-based method was indeed shown to effectively addresses the inherent limitations of both kinematic and kinetic methods used in isolation. The author used an innovative approach to validate CoM estimates, based on incorrect CoM estimates violating Newton's laws of motion. The new method substantially reduced errors compared to conventional approaches based on kinematic (and anthropometric) or kinetic data only. The paper presents a clear and comprehensive description of the method and code implementation is provided such that the method can be easily adopted by colleagues in the field. The author also shows how the new method improves the analysis of stabilizing feedback control of walking, demonstrating the promise it holds for the analysis of balance control.
The method was tested on a small data set and further testing, preferably with participant pool showing large variance in anthropometrical properties, seems warranted. This may also lead to further improvement of the approach. For example, the anthropometrical model used could be refined by using regression equations that take into account segment circumferences of the individual tested (Zatsiorsky, 2002) or even by using individual imaging data. However, the proposed optimal combination of kinematic and kinetic data is likely to become a cornerstone of future methods for accurate CoM estimation.
References
- Le Mouel, C., 2025. Improved accuracy of the whole body Center of Mass position through Kalman filtering. bioRxiv, ver.3 peer-reviewed and recommended by PCI Health & Movement Sciences. https://doi.org/10.1101/2024.07.24.604923
- van Dieën, J.H., Bruijn, S.M., Afschrift, M., 2024. Assessment of stabilizing feedback control of walking: a tutorial. J Electromyogr Kinesiol 78, 102915. https://doi.org/10.1016/j.jelekin.2024.102915
- Wang, Y., Srinivasan, M., 2014. Stepping in the direction of the fall: the next foot placement can be predicted from current upper body state in steady-state walking. Biol Lett 10(9), 20140405. https://doi.org/ 10.1098/rsbl.2014.0405
- Welch, T.D., Ting, L.H., 2008. A feedback model reproduces muscle activity during human postural responses to support-surface translations. J Neurophysiol 99, 1032-1038. https://doi.org/ 10.1152/jn.01110.2007
- Zatsiorsky, V., 2002. Kinetics of Human Motion. Human Kinetics, Champaign, Illinois.